









Inzwischen gibt es wieder Neuigkeiten in Sachen Quadrocopter. Der Phantom sollte mit einem Gimbal ausgestattet werden. Ich habe mich für ein Tarot T-2D Brushless Gimbal entschieden. Was beim Auf- bzw. Anbau zu beachten ist, werde ich hier mal zusammenfassen.
Des Weiteren geht es um die Steuerung des Gimbals über den Sender.
Zusammenbau

 Fangen wir mit dem Aufbau des Gimbals an. Dieses wird in einer schlichten schwarzen Schachtel geliefert. Darin enthalten sind, teilweise schon vormontiert, alle Teile für den Aufbau. Vor dem Aufbau gibt es einen Punkt zu klären – soll das Gimbal direkt am Phantom befestigt werden oder mit Hilfe einer Adapterplatte. Davon ist nämlich abhängig in welcher Reihenfolge das Gimbal aufgebaut wird.
Fangen wir mit dem Aufbau des Gimbals an. Dieses wird in einer schlichten schwarzen Schachtel geliefert. Darin enthalten sind, teilweise schon vormontiert, alle Teile für den Aufbau. Vor dem Aufbau gibt es einen Punkt zu klären – soll das Gimbal direkt am Phantom befestigt werden oder mit Hilfe einer Adapterplatte. Davon ist nämlich abhängig in welcher Reihenfolge das Gimbal aufgebaut wird.
Sicherlich hat beides seine Vor- und Nachteile. Letztendlich habe ich mich aus folgenden Gründen dazu entschieden das Gimbal direkt am Phantom zu befestigen:
- ohne Senkkopfschrauben Abstand zwischen Phantom und Adapterplatte
- durch die direkte Befestigung am Phantom hängt das Gimbal höher, so dass man weniger am Landegestell ausgleichen muss
- Kabel für Stromzufuhr / Steuerung können bei diesem Schritt sauber im Rahmen verstaut werden.
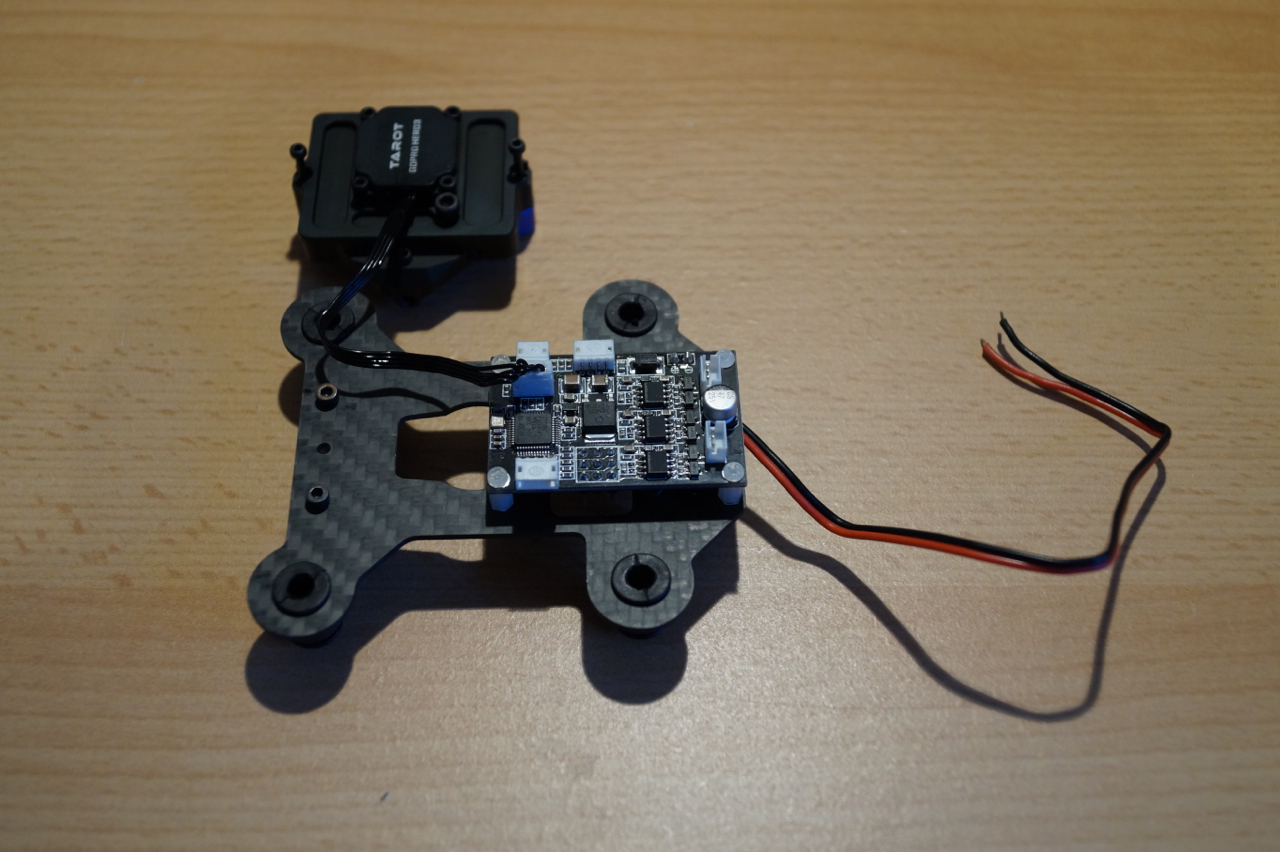
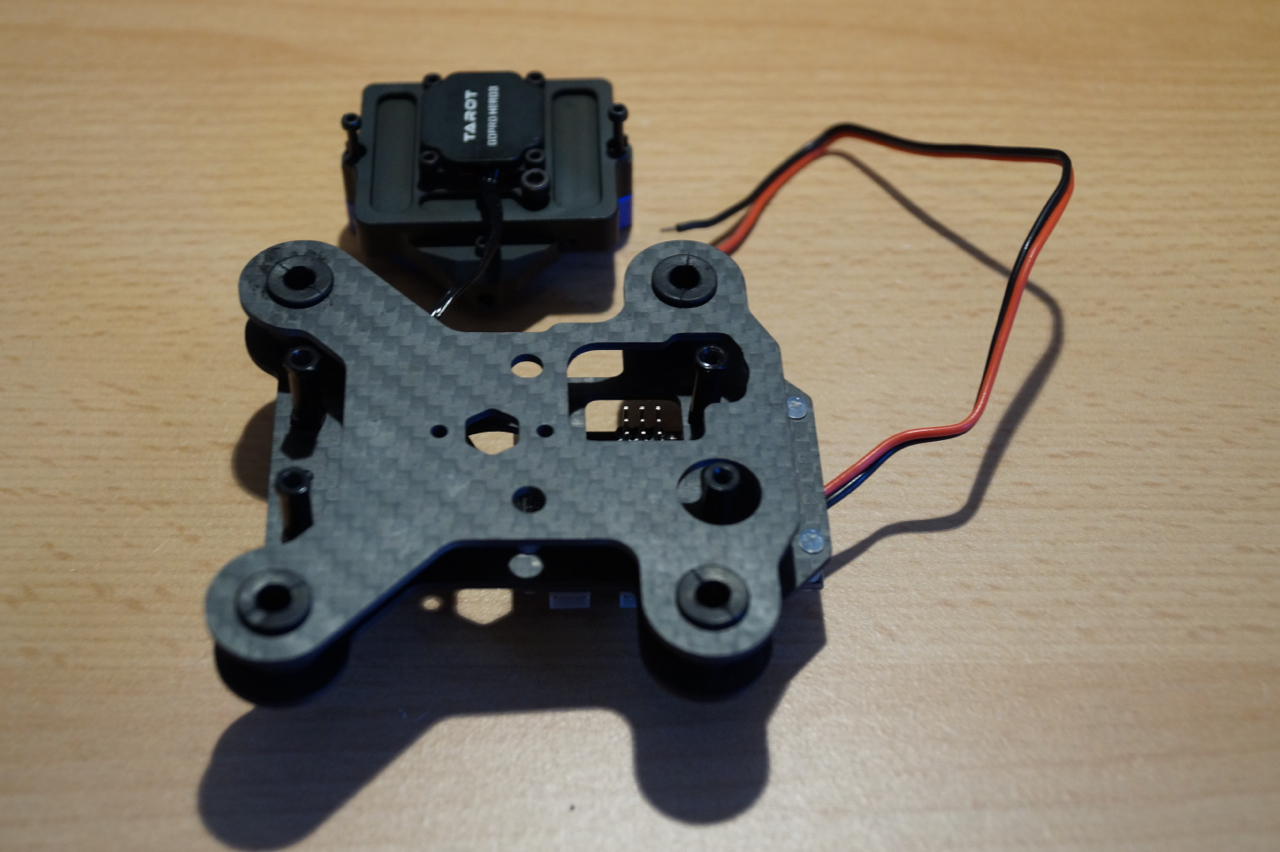
Somit ging es bei mir an den Aufbau und ich konnte mich an die beiliegende Aufbauanleitung halten. Hierbei gibt es eigentlich nur eine Hürde zu nehmen. Man muss genau darauf achten auf welche Seite man die Abstandshalter schraubt, um später durch die vorgesehen Löcher Zugang zu den Anschlüssen der Elektronik zu gelangen.
Des Weiteren empfiehlt es sich mittelfestes Loctide für die Schraubverbindungen zu verwenden.

Wer sich dazu entscheidet eine Adapterplatte zu verwenden, muss den Aufbau an dieser beginnen. Hierbei werden die Abstandshalter an der Adapterplatte befestigt. Diese wird an den Phantom geschraubt. Anschließend kann der Aufbau des Gimbals weitergehen.
Die Frage welchen Motor ich an welchen Anschluss klemmen muss, konnte mir die beigelegte Anleitung leider auch nicht beantworten. Daher hieß es hier ausprobieren. Die Belegung ist von hinten gesehen folgende:
- Pitch -> rechter Anschluss
- Roll -> linker Anschluss
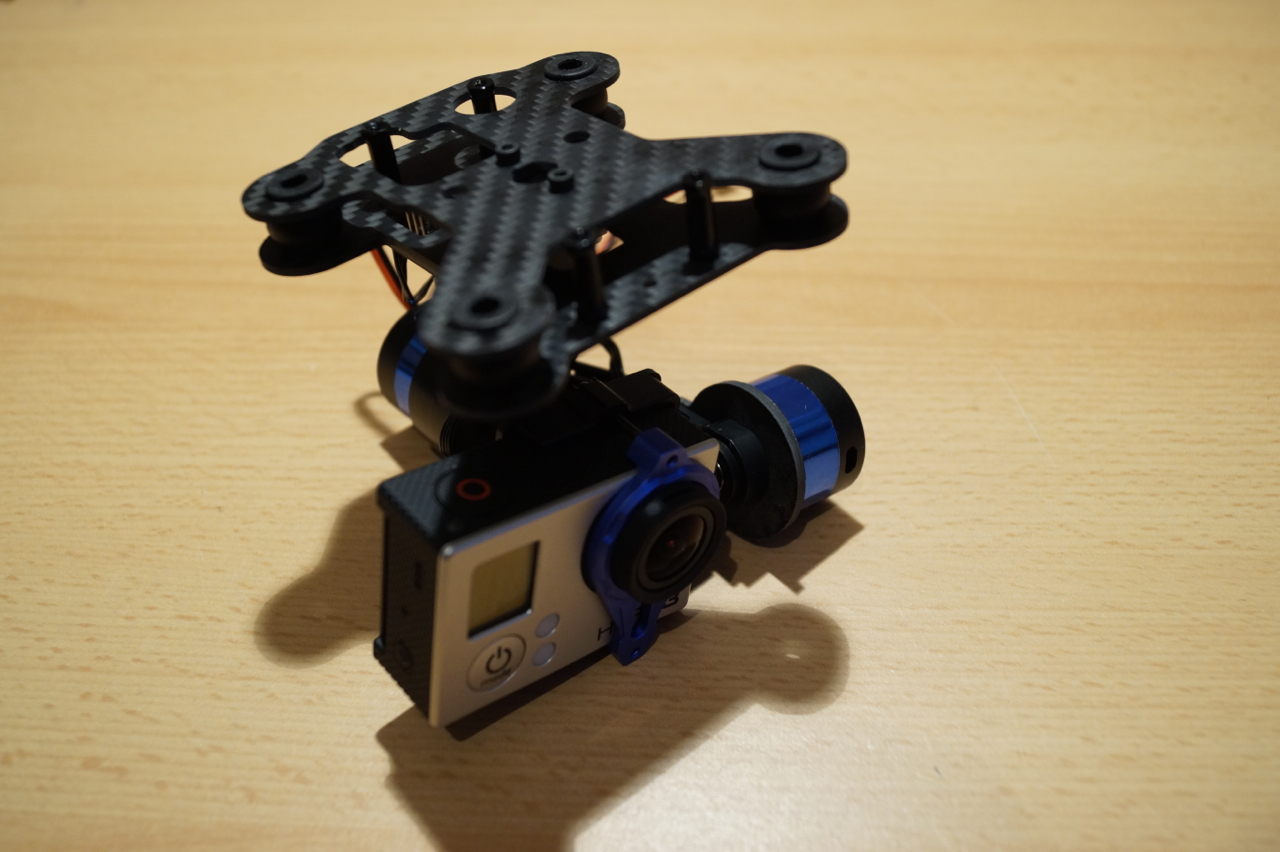
Damit ist der erste Schritt getan und das Gimbal ist zusammengebaut.
 |
 |
Anbau
Nun konnte es an den Anbau gehen. Bevor ich mich dafür entschied das Gimbal direkt am Phantom zu befestigen, hatte ich mir eine provisorische Adapterplatte aus Plexiglas geschnitten. Somit hatte ich bereits die Punkte für die Bohrlöcher, so dass ich diese nur noch auf den Phantom übertragen musste. Die Löcher habe ich mit einem kleinen Bohrer und einem Akkuschrauber vorgebohrt. Anschließen konnte ich diese auf die richtige Größe (2,5 mm) vergrößern und erhielt somit sauber Löcher für die Befestigung.
Die vorderen Löcher habe ich direkt am Rand gesetzt. Somit hat man durch die geöffnete Akkuklappe Zugang zu den Löcher und kann die Schrauben bequem reindrehen. Der Einschub des Akkus wird dadurch nicht behindert.

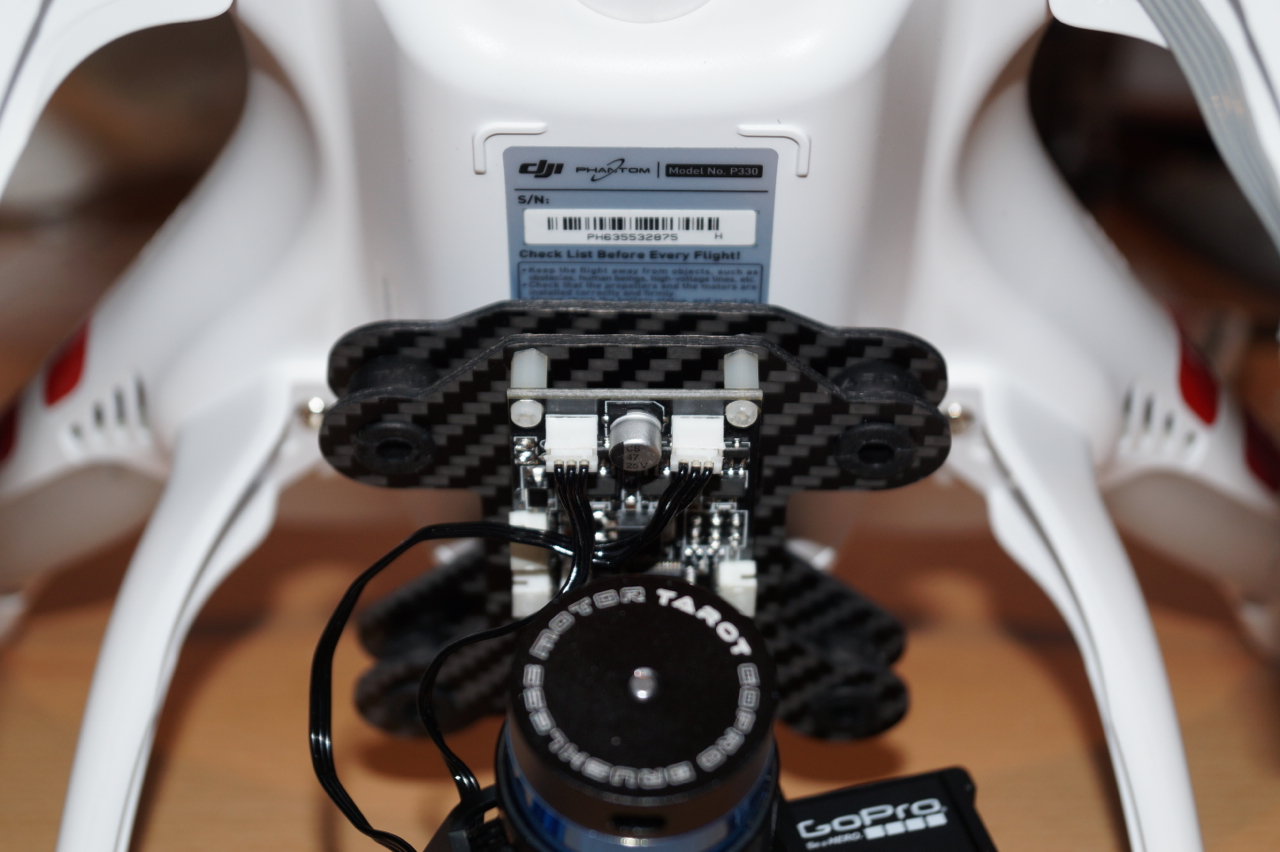
Komplizierter wurde es bei der hinteren Befestigung. Hierfür musste leider die gesamte Elektronik aus dem Phantom ausgebaut werden.
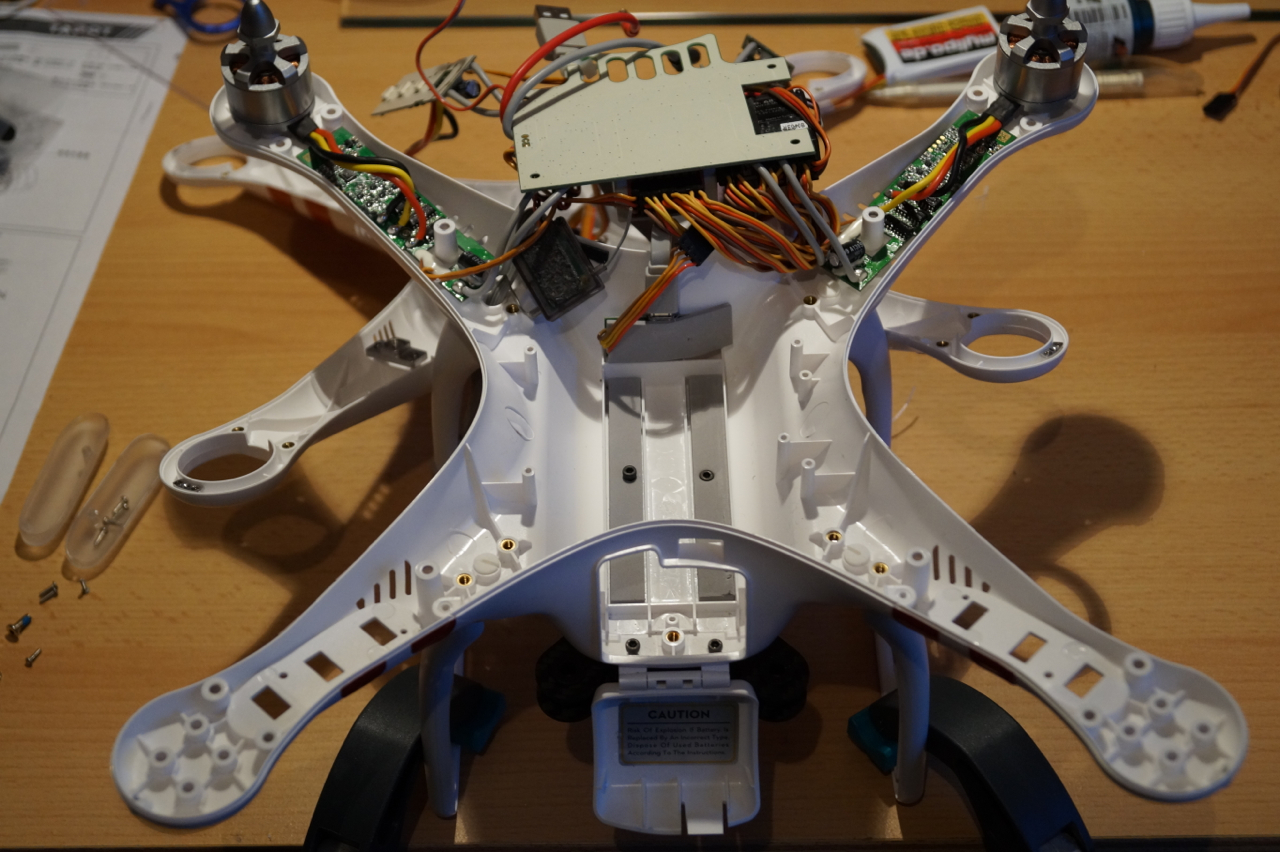
Auch hier haben die Schrauben keinen Einfluss auf den Einschub des Akkus, da sie in dem Schaumgummi versenkt werden können.
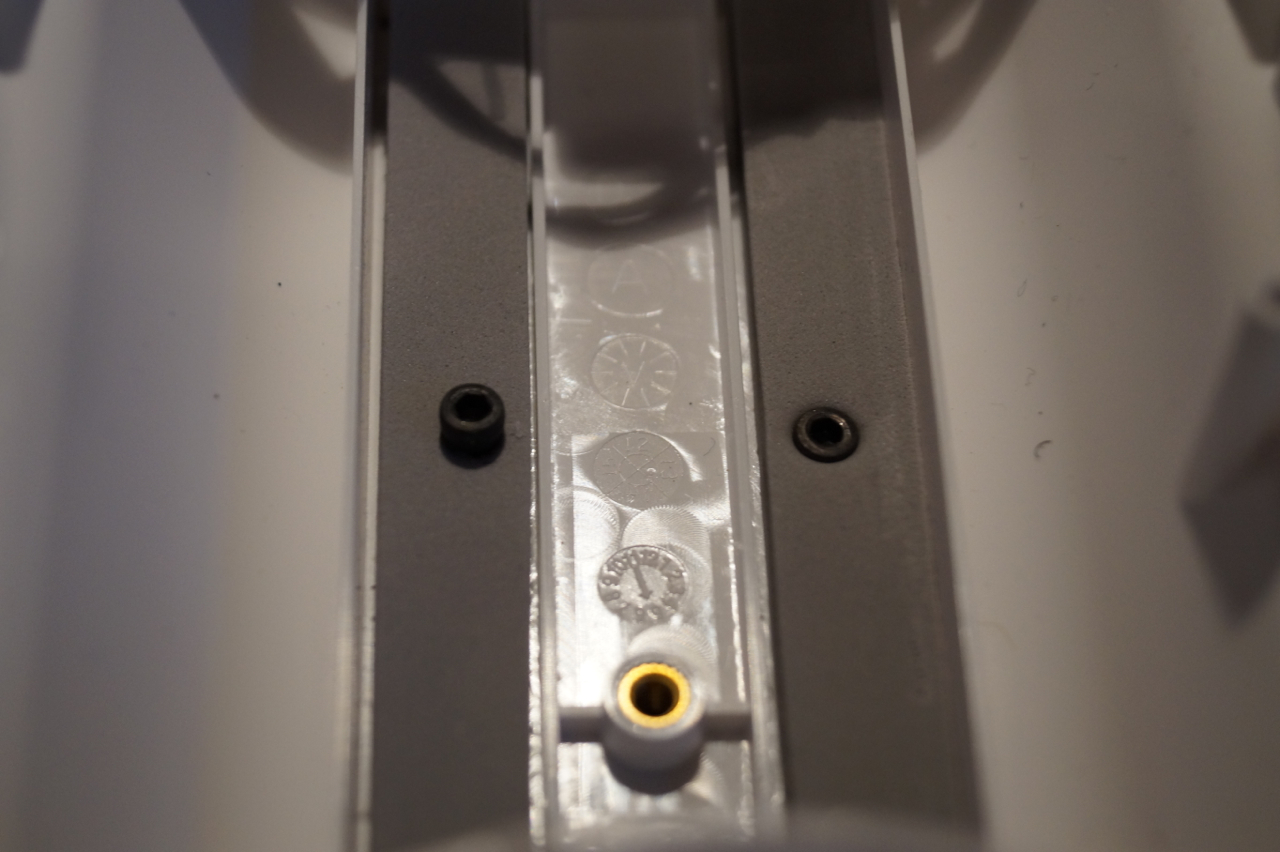
Für die Kabel habe ich ein weiteres Loch am seitlichen Rand gebohrt. Dieses musste etwas größer ausfallen, da ich neben der Stromzufuhr noch ein Kabel für die Pitch-Steuerung des Gimbals verlegt habe.


Kabelbelegung |
|
|---|---|
| Naza-M | Tarot Controller |
| F1 Oben | – Mitte |
| F1 Unten | T |
| F2 Unten | C |
Das Kabel für die Stromzufuhr habe ich direkt an den Anschluss an der Hauptplatine gelötet (siehe DJI Phantom – Spektrum und Telemetrie (Update)).
Damit war der Anbau erledigt. Im nächsten Schritt ging es an die Programmierung des Senders, des Naza-M sowie des Gimbals.

Konfiguration
Im ersten Schritt muss im Sender ein Schalter für die Steuerung belegt werden. (Download am Ende). Ich habe hierfür den Schalter „Gear“ verwendet, da ich zunächst nur 0 und 90 Grad ansteuern möchte. Der Servoweg reicht von -100 – 100.
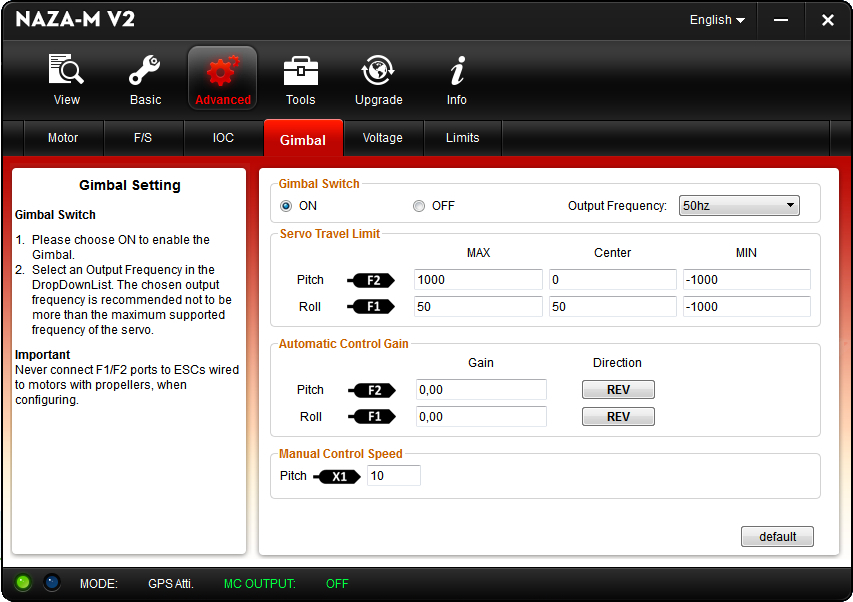
Anschließend muss im Naza-M die Gimbalsteuerung aktiviert werden. Dies tut man in der Naza-M Assistant Software unter Advanced -> Gimbal. Hier sind folgende Werte einzustellen.
Als letztes begrenzt man den steuerbaren Weg des Gimbals. Dazu verbindet man das Gimbal mit Hilfe des mitgelieferten USB-Dongels mit dem Rechner. In der Software zum Gimbal lassen sich nun die Werte für den Drehbereich für Pitch entsprechend einstellen. Diese müssen nur noch auf das Gimbal geflasht werden, womit auch dieser Schritt erledigt ist.

Nun lässt sich das Gimbal mit dem Schalter um 90 drehen, so dass die GoPro im Flug senkrecht nach unten Filmen kann.
Flugbereit ist der Phantom in diesem Zustand noch nicht. Hierfür muss zunächst das Landegestell angepasst werden. Ich habe hierfür weiße Kunststoffunterlegscheiben zwischen Landegestell und Rahmen eingesetzt. Die Schrauben habe ich durch M3 16mm Schrauben ersetzt.

Alles in allem hat mich der Einbau einschließlich der Überlegungen und hin und her bauen rund 5 Stunden gekostet. Man sollte sich hierfür also genug Zeit nehmen.
Aktuelles Sendersetup mit den bisherigen Einstellungen/Funktionen: DJI Phantom (927 Downloads)
Testvideo
Ein kurzes Testvideo ist ebenfalls schon entstanden. Wie man hört, war es verdammt windig. Das Gimbal verrichtet aber einen ordentlichen Dienst.
Anmerkung
Aus meiner Sicht ist dieser Schritt nicht für Anfänger geeignet. Hierfür ist zuviel einzustellen. Des Weiteren muss für diese Lösung der Phantom quasi komplett zerlegt werden. Hierbei können sich leicht Steckverbindungen lösen oder Kabel abreißen.
Daher von meiner Seite: Nachbau nur auf eigene Gefahr!